
Tricopter – part 2
In part one of this build log I wrote about most mechanical things you should do to build a tricopter, also on addenium I wrote about my errors in making first part of tricopter (you should read it!).
Now, it’s time to finish it.
In spite of my feeling that I did most of the work, part two took more time than first.
Preparing and connecting ESCs
I bought for this tricopter cheapest ESCs available 🙂 : Hobbyking SS Series 15-18A
If you have some electronic skills you should flash it with SimonK dedicated firmware. If not, I recommend you just use a little more expensive Turnigy Multistar ESCs.
Flashing my ESCs with SimonK I described in my previous blog post.
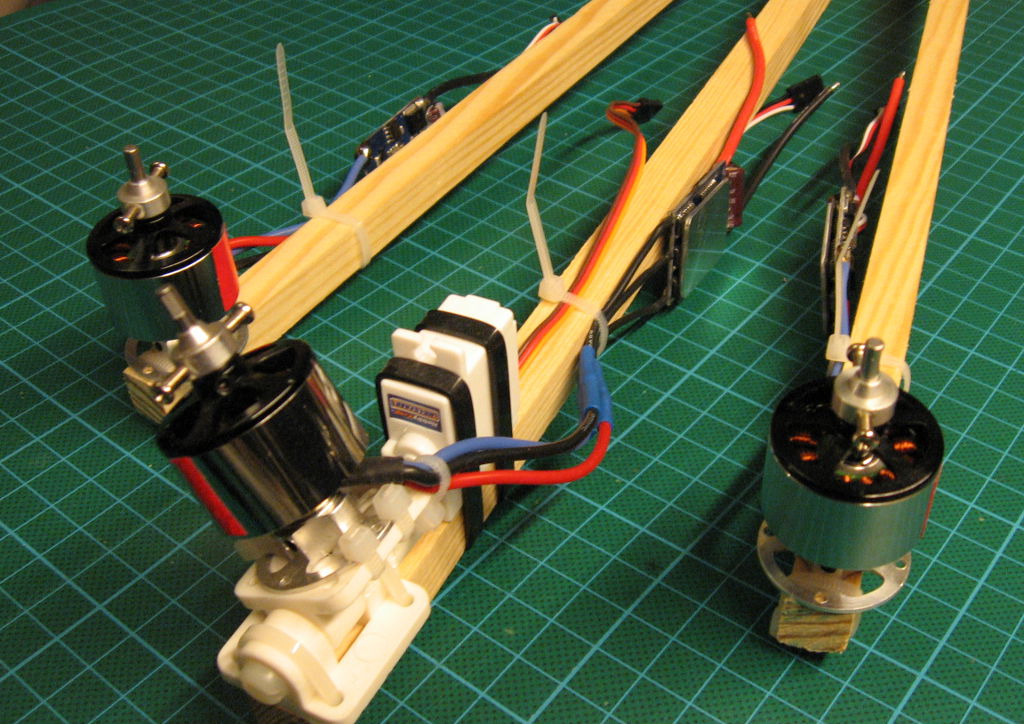
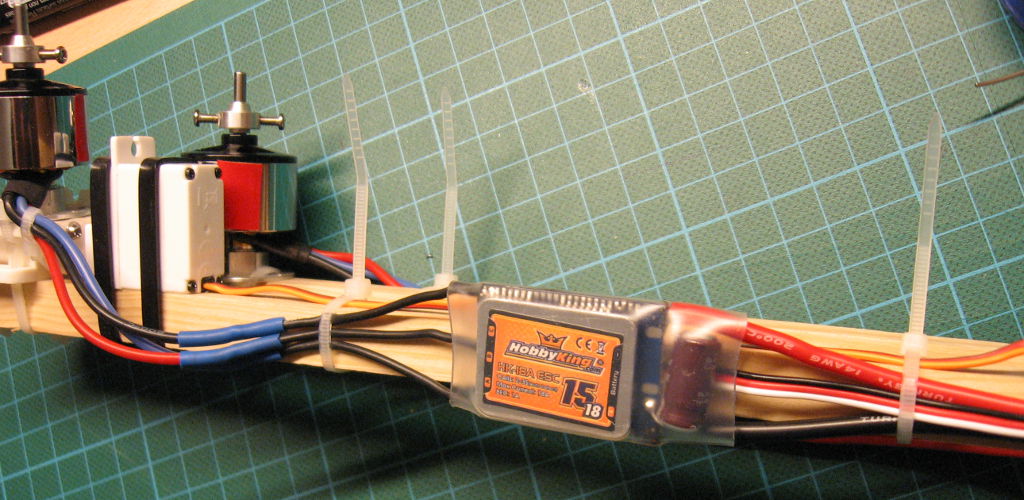
On arms I connected motors directly to ESCs removing original short cables.
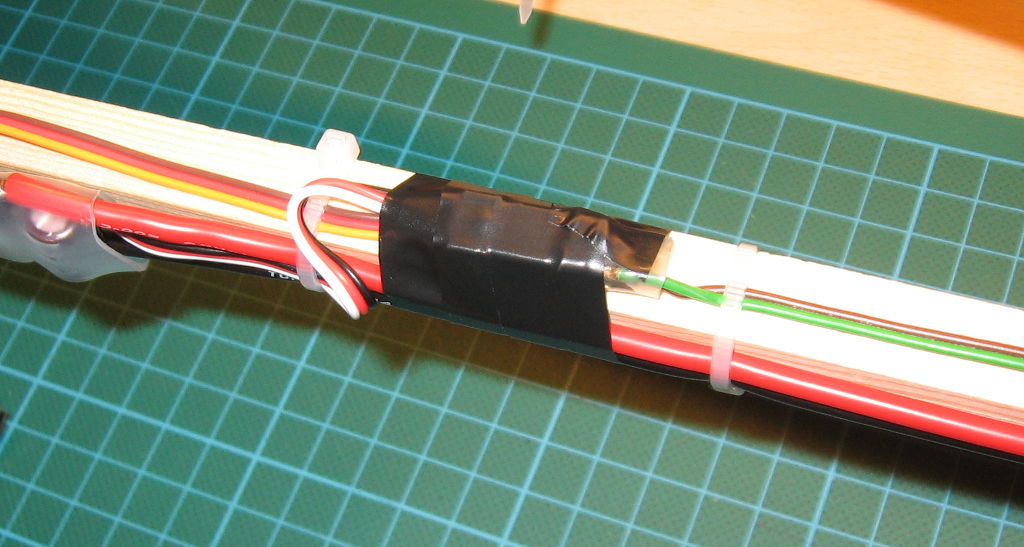
On tail I soldered motor cables to ESC’s cables because this part moves and longer cables are less stressed and less prone to wear out. Before fastening cable for tail, make sure that it’s loose in all sway/servo position. Also don’t forget to fasten cables to yaw sway – cables should not move directly near motor.
Balancing motors and props
Having ESCs connected to motors and yet separately is good opportunity to balance motors and props.
At first, simple servo tester should be handy (or you can use transmitter and receiver for this, but it makes things more complicated 🙂 ).
First, balance motors with small piece of electric tape or zip-tie :-). There are many films on youtube about how to do it, even with laser as on FliteTest video. Personally, I use my hand to feel vibrations. I used earlier Android phone with Vibration Monitoring application, but I feel that my hand is more sensitive 🙂
When you know on which side you schould put some weight, put sticker there and start balancing procedure again until you’ll be satisfied (or bored) 🙂
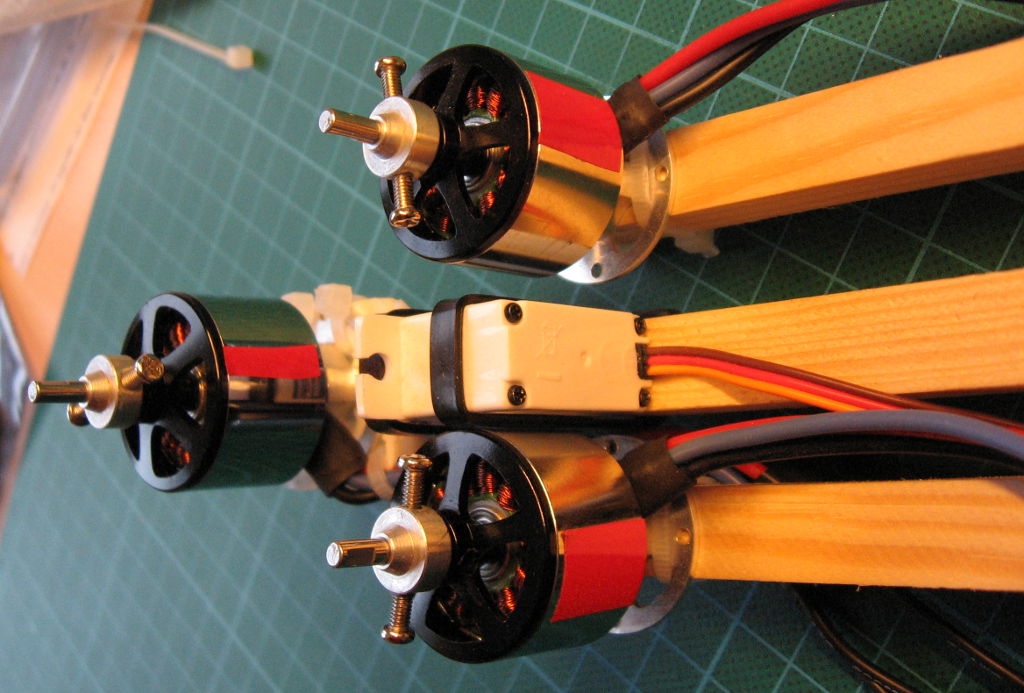
There are my motors with stickers:
Second, choose the best balanced motor and use it for balancing propellers. It’s really needed.
For pointing how much weight I should put to one blade of prop, I use the same electric tape as for motors. But for making it permanent I use Scotch Magic Tape.

Speaking of props, I use GWS 10×4.7 genuine props from local hobby store. At start I used GWS RD-1047 from HobbyKing (no longer available but the same as from local store except colour), then I bought also 1047R Right Hand Rotation which I think was a mistake – these props are very flexible and I have mixed feeling about them. I thought that having one prop with opposite direction is a good idea (tail motor will be more staight), but not with these props 🙁
Bottom plate (camera and battery mount)
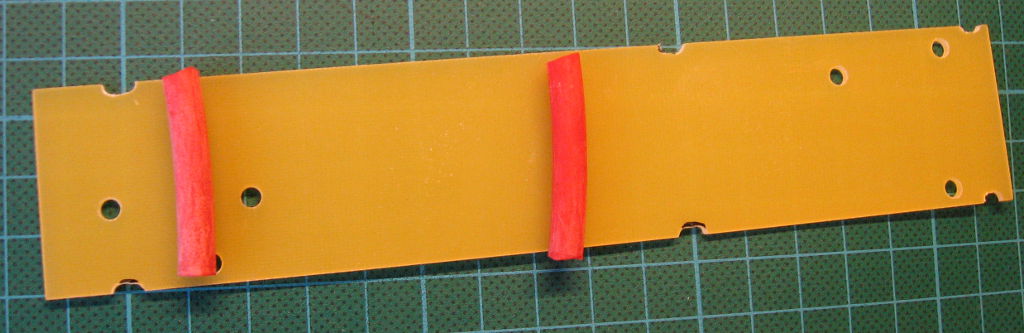
I had a ready made part from glass fiber laminate in appropriate dimensions, to I just used it – as you can see, there are some strange holes because of that.
The thing I had to make, there are 6 small half holes on sides of this plate. Four are for mounting zip-ties, two for camera.
On the picture there are also pieces of rubber used for connection between bottom plate and main frame.
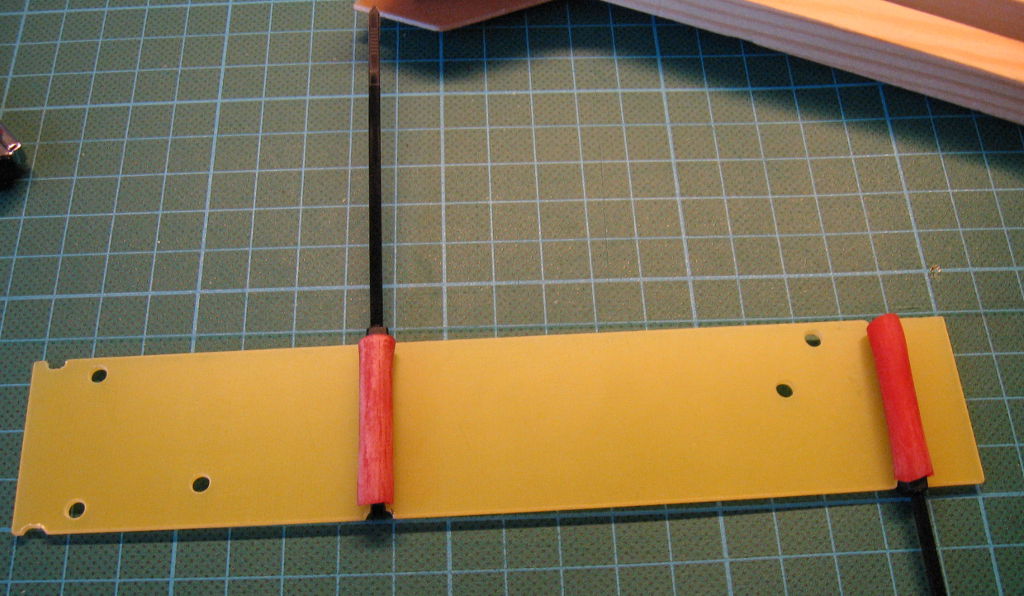
Similar side holes I made on center plate:

It’s time to assemble bottom plate to the rest of Tricopter:
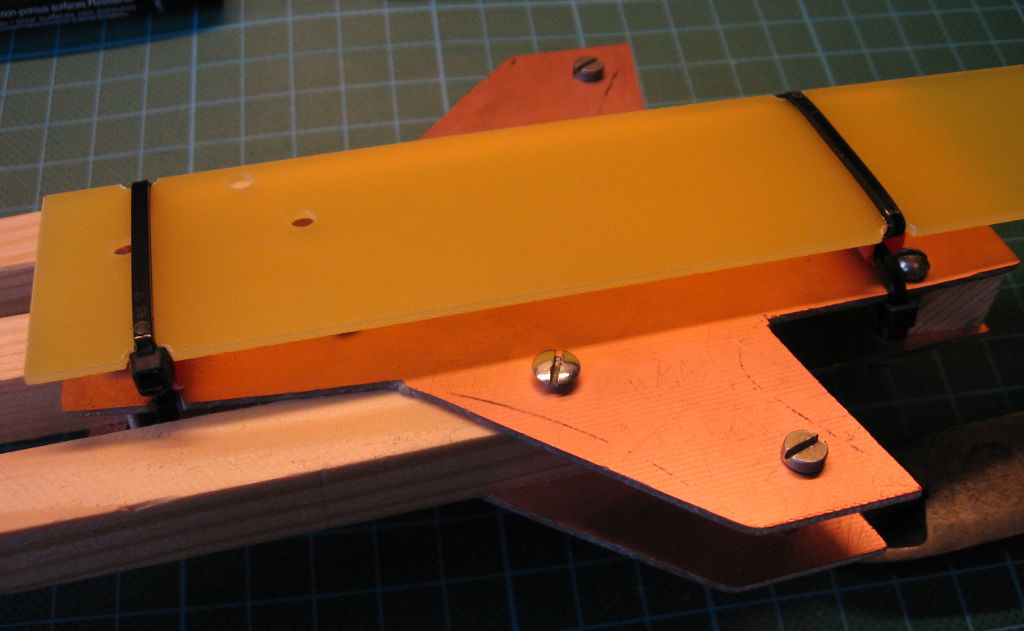
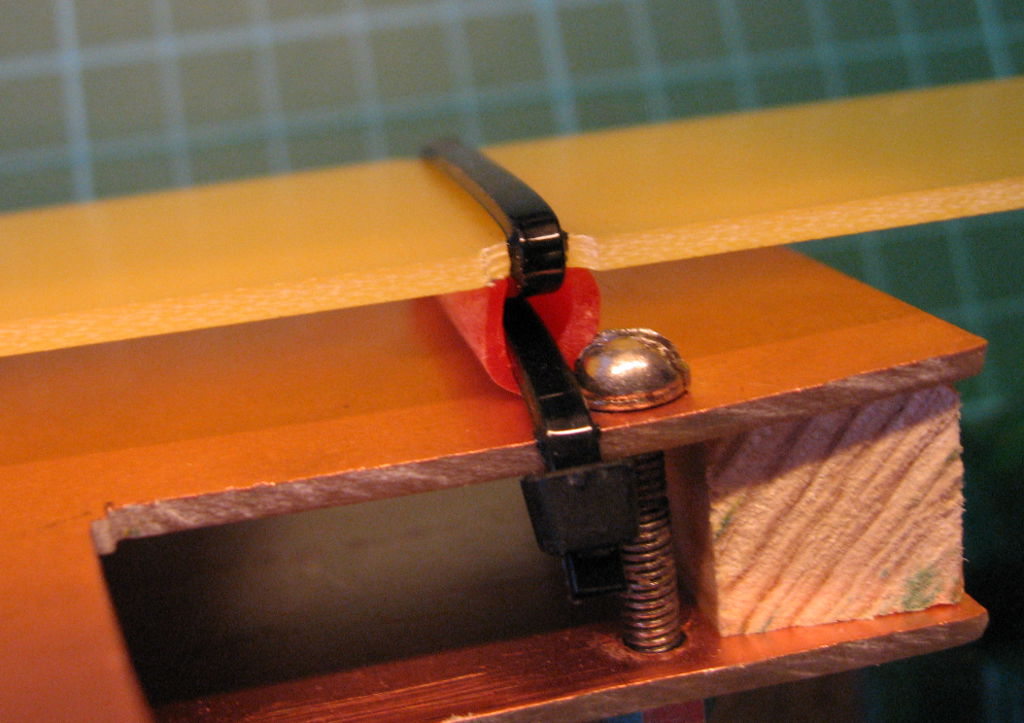
Don’t use 2.5mm zip-ties for front connection as on above pictures – there are not strong enought to withstand hard landing. Use 4.6mm for good and strong connection.
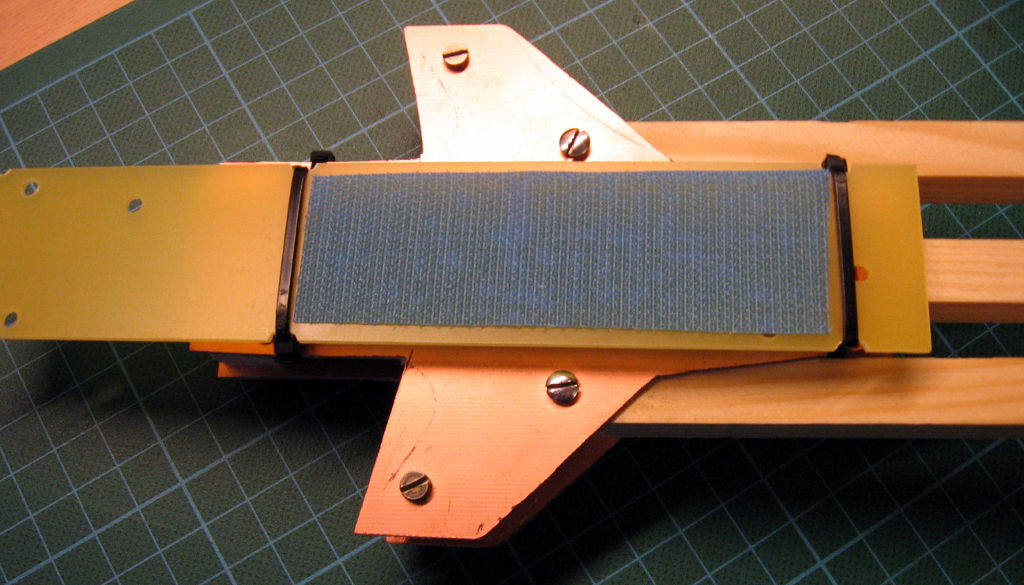
I put velcro on bottom plate for good good mechanical battery connection:
Power cables
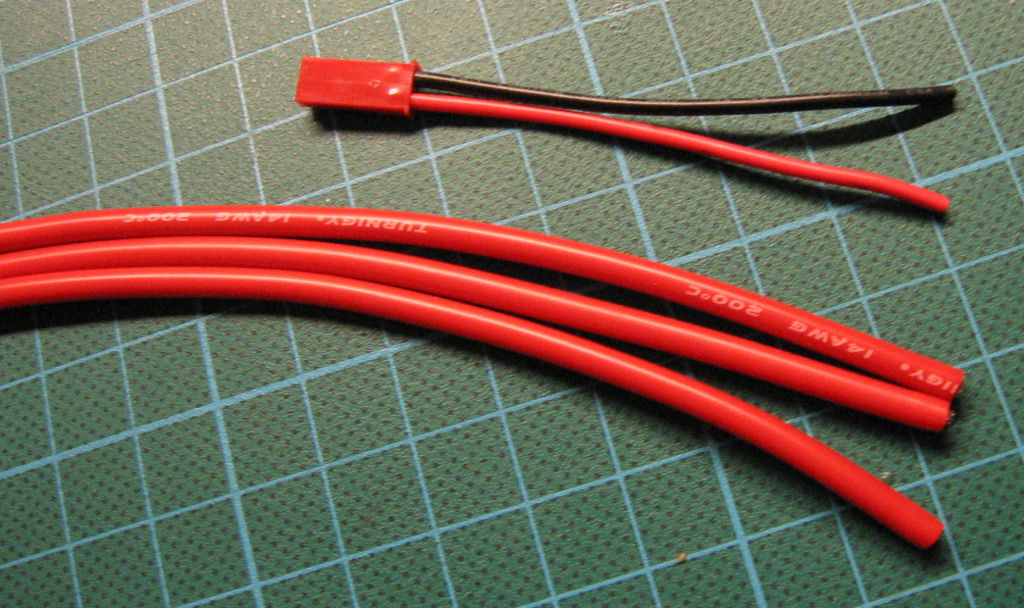
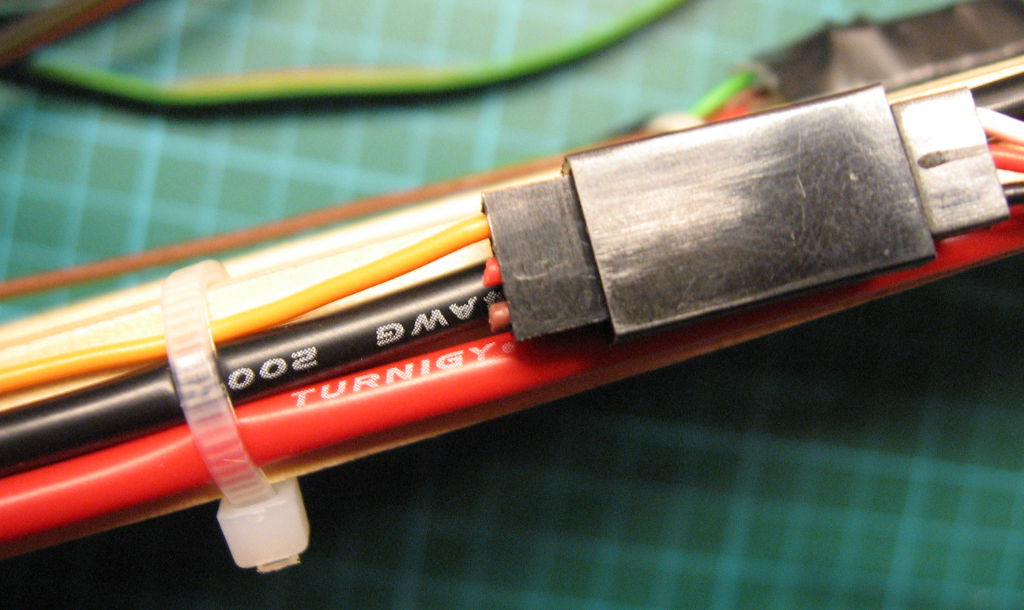
Having removed shrink-wrap from ESC, I also removed short stock cables and soldered longer ones using Turnigy Pure-Silicone Wire 14AWG (RED and BLACK). 2 meters from each of them should be enough. Then I put new shrink-wrap on ESCs:
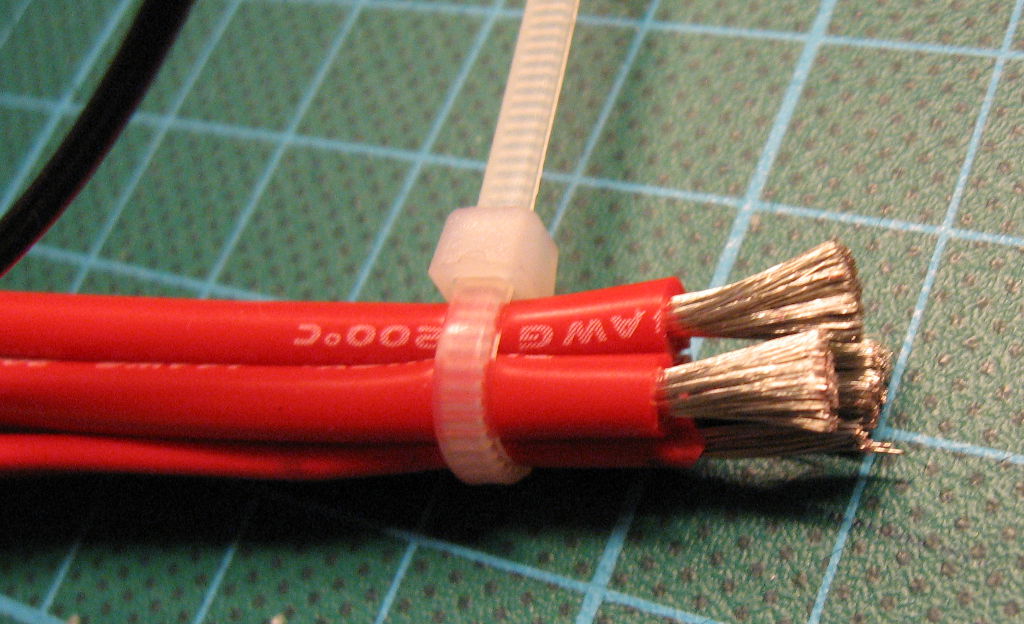
Soldering other end of all cables is little tricky. As usual, David’s idea is great also for this problem: put all ends together and wrap it up using thin wire. I also get cables together using one zip-tie for even easier soldering:
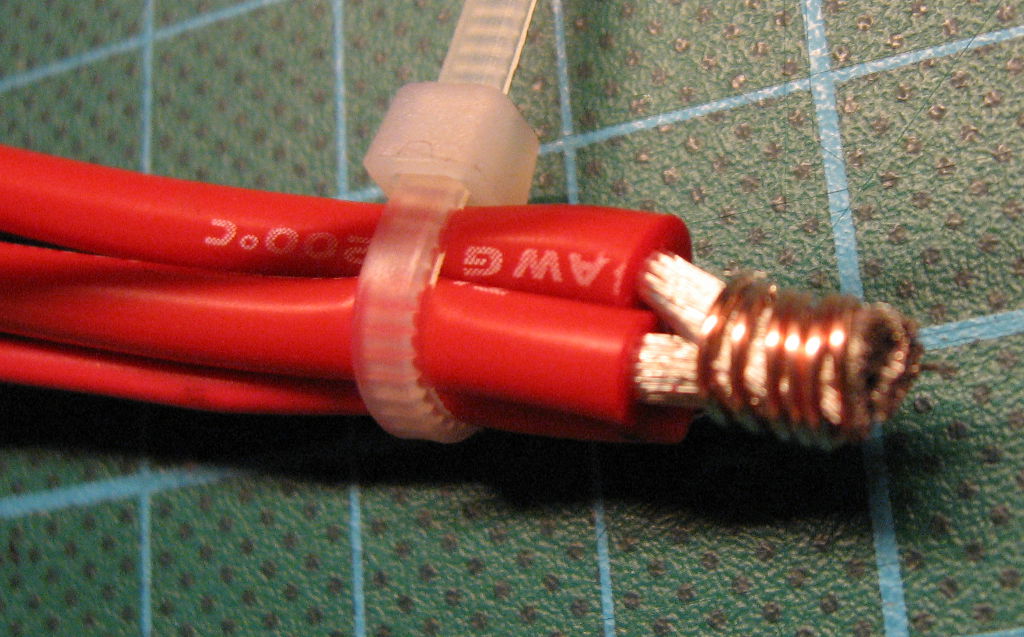
Now, soldering is quite easy:
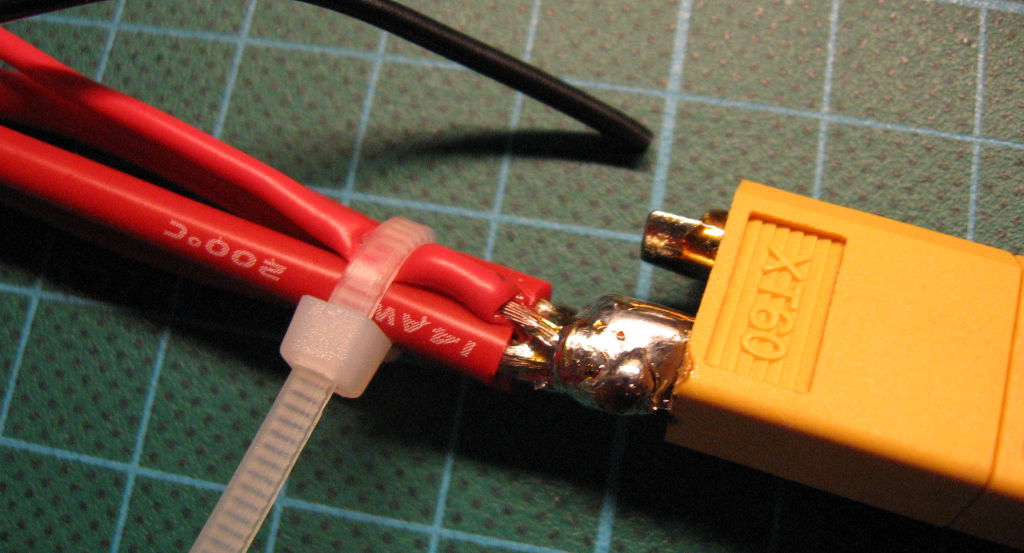
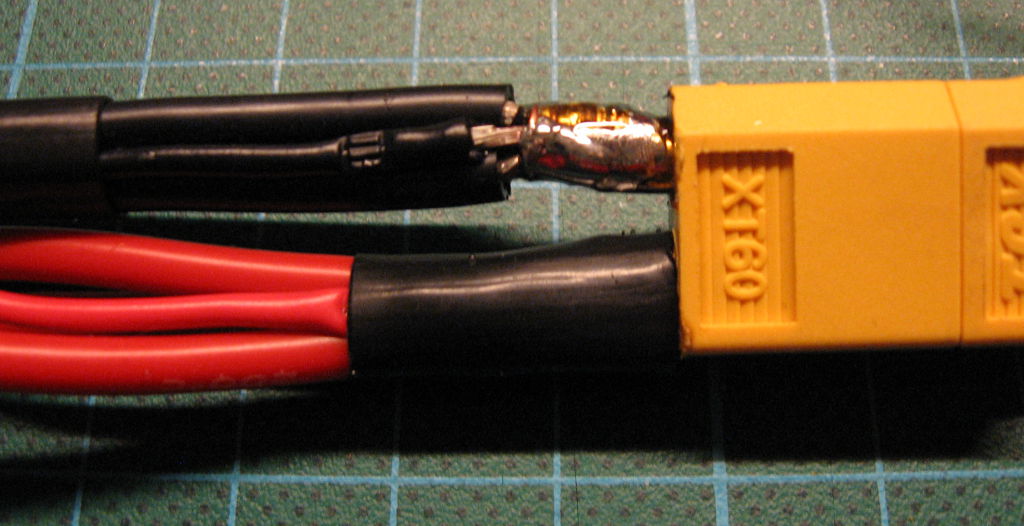
Battery connector ready:

Mounting FC (flight controller)
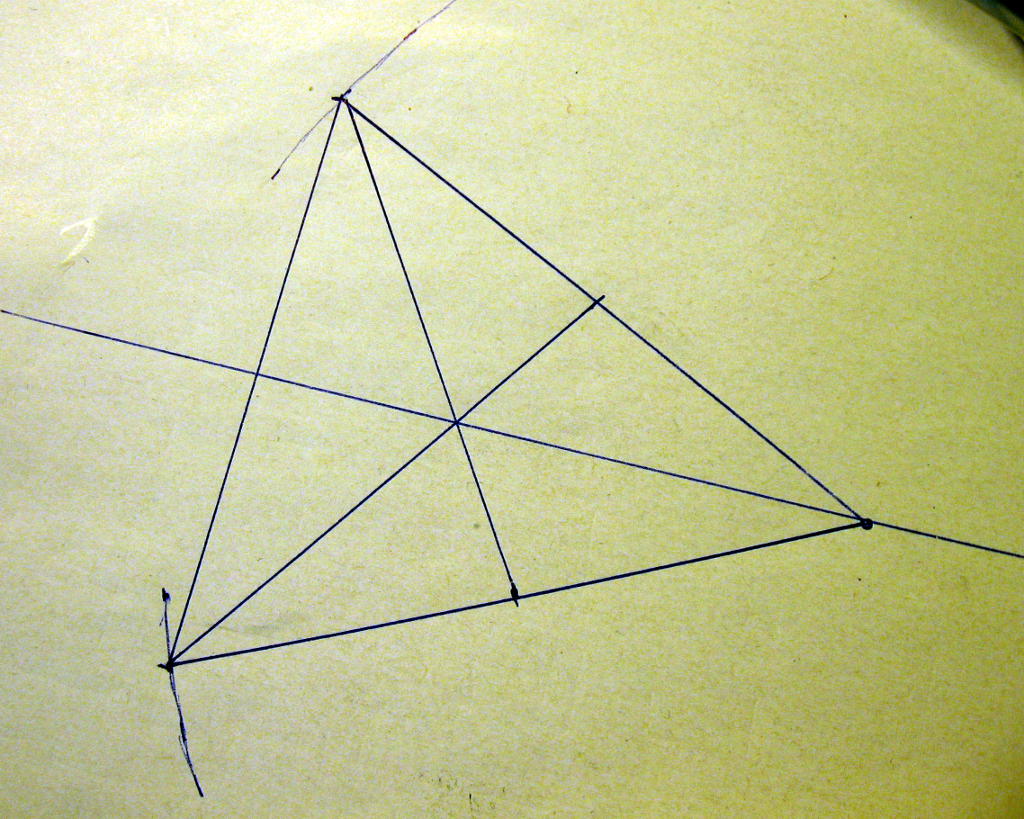
Somehow I made tricopter with different distance between left-rigth and front-rear motors. FC should be placed exactly on center of gravity (CG), so I had to calculate it.
The easiest way of calculation CG of triangle is just draw it and draw lines between each apex and middle of opposite side. The crossing of each of these lines is CG:
And this is a place when my own adventure begins 🙂
David is using KK2.0 FC board but this board has only gyroscopes and accelerometers, so I choose cheaper one with more sensors (obvious choice for me:-) ): MultiWii 328P Flight Controller w/FTDI & DSM2 Port. More info about this board I wrote in my earlier post.
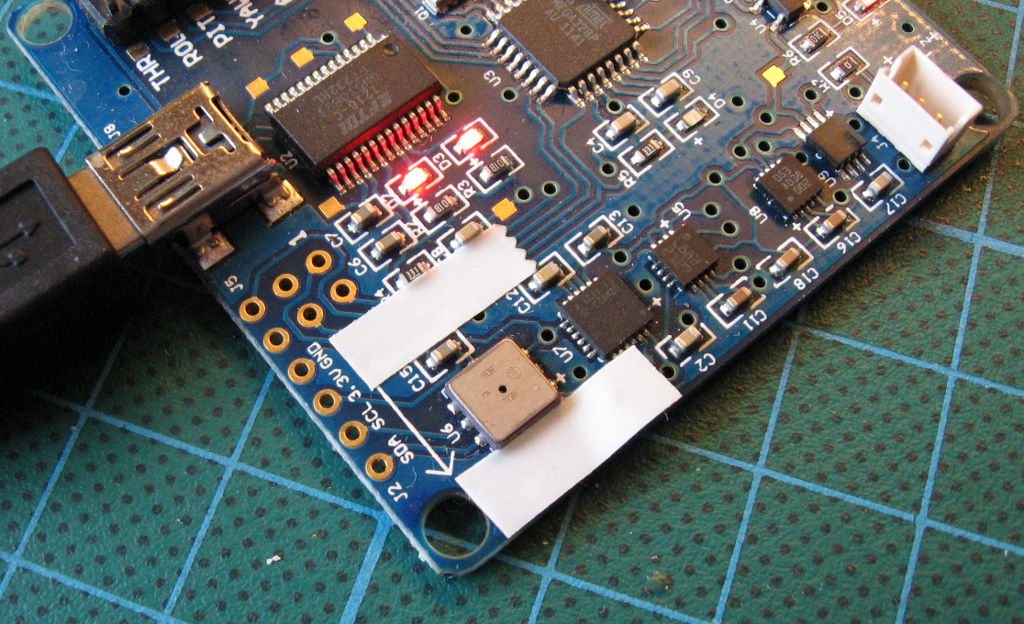
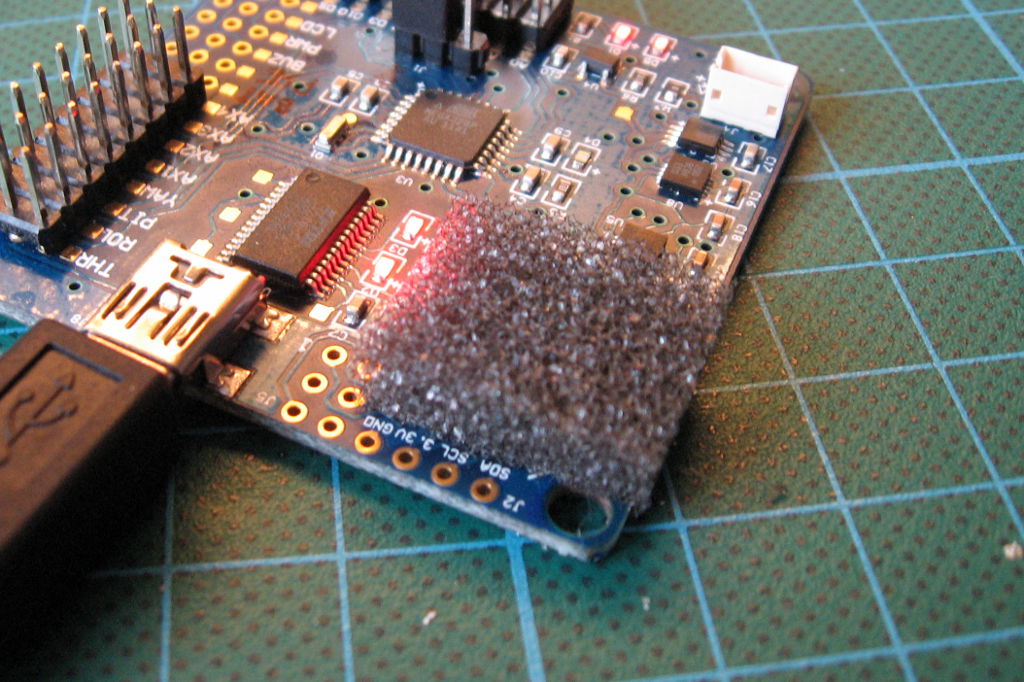
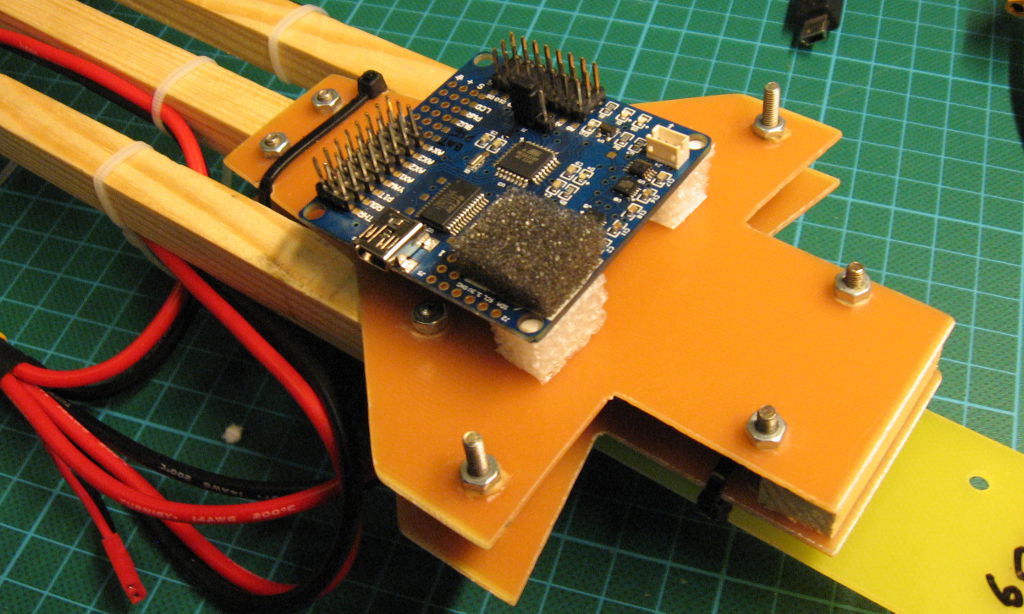
First move is to secure barometer (altimeter). This sensor is sensitive to light and also should be separated from wind for accurate readings, so I put piece of sponge on it using two sided adhesive tape:
I prepared 3 anti-vibration ‘legs’ for mounting FC to center plate:

And mounted all together using strong two-sided adhesive tape:
Connecting FC and ESCs
Each ESC have it’s own BEC. Connecting it all together could be not very good idea, expecially with such long cables.
So, tail ESC use it’s BEC only for powering servo. I made custom connector from 2×3 pin header, connecting power lines (+/-) from ESC to servo and connect only signal wires to FC. Without ground (-) to avoid ground loop!
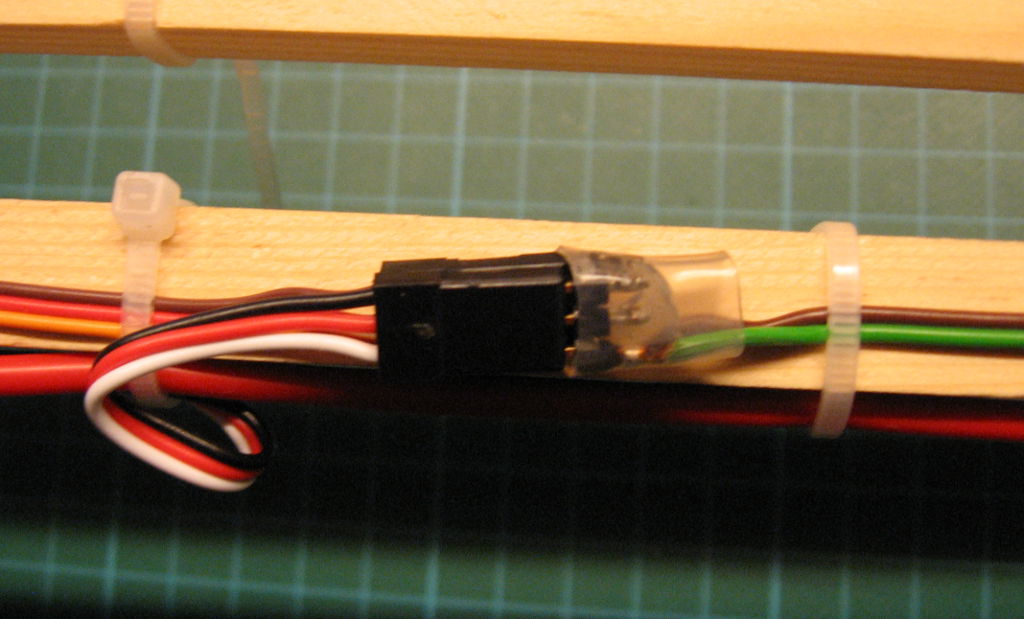
Each connector must be secured somehow, I choose easiest way – just use electric isolation tape:
On the right arm, I used just 30CM Servo Lead Extention to connect ESC to FC, so this ESC powers FC.
On tle left arm I used also servo extension, but I cut off power wires (+,-) from it:
Then I connected it to FC according to Multiwii documentation and table on my post about this FC:
- tail motor should be connected to D9 in Arduino, this is D9 or BUZ in this FC
- tail servo should be connected to D3 in Arduino, and this is AX4 on this FC
- left motor should be connected to D11 (the same on Arduino and this FC)
- right motor should be connected to D10 (also the same)
- signal from receiver I connected to THR (D2 on Arduino). I could make only one connection because I use receiver with CPPM output (FrSky D4R-II)
All connections done:
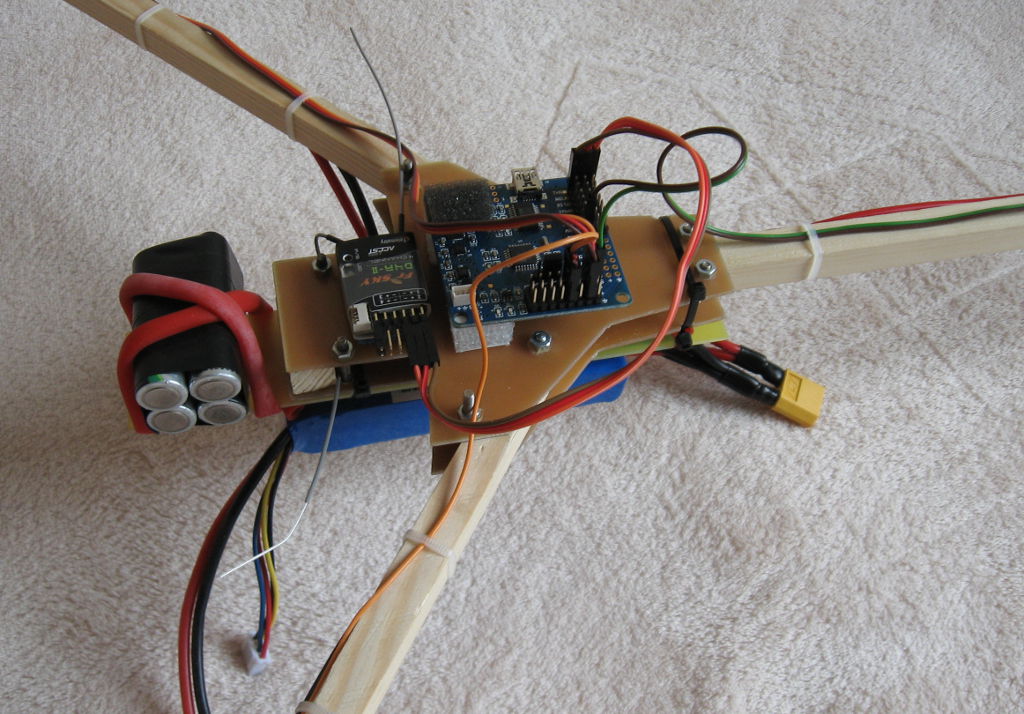
In above picture there are 4 AA batteries as ballast instead of GoPro camera – it’s safer for first tests 🙂
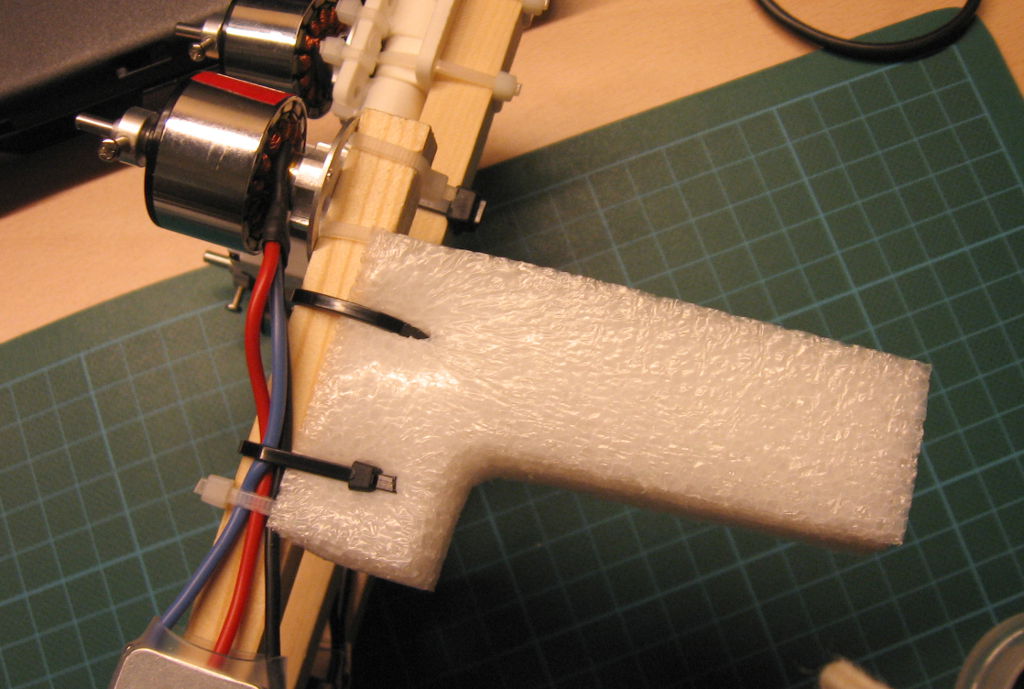
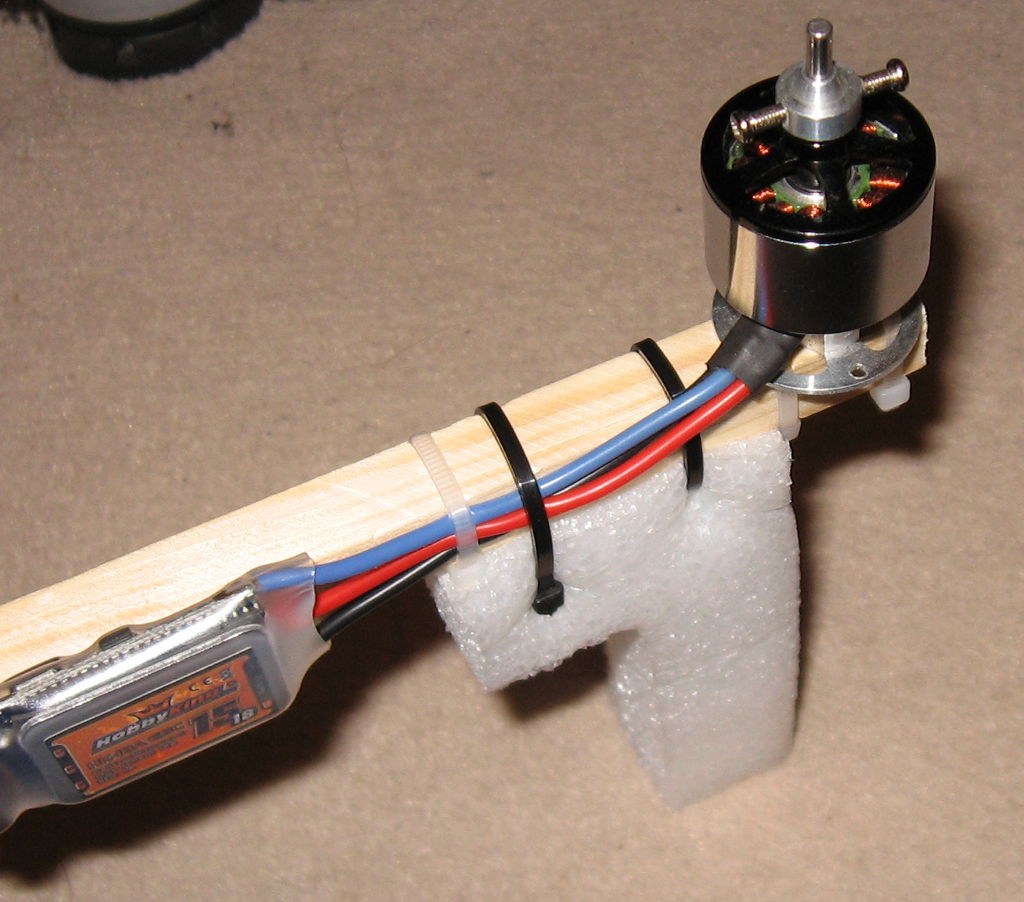
Legs
I needed some shock absorbing legs for learning how to fly Tricopter, so I made it from some foam:

Ready for first flight
For first flight it’s enough:

More to come…
Zajefajnie ciekawe
Czekam na ciąg dalszyy
Ciag dalszy na pewno będzie. Jako, że lata to już od dłuższego czasu, to będą to głównie doświadczenia z użytkowania (w tym rozbijania) i modyfikacje/ulepszenia. Tylko czasu trochę muszę znaleźć na opisanie tego wszystkiego.
Nice tricopter. I just started building and flying tricopters about a month ago. I’ve been reading your blog because I am going to try the same FC board. I prefer the KK2,but they are hard to come by,so I am going to try this board. I have some suggestions from my brief flying experience. Use connectors between your motor leads and your esc’s. That way if you crash and your motor breaks loose you won’t pull out the wires from your motors. Use zip ties on the esc side of the connectors,so the motor leads pull out during a crash. A very good build video is from Simplecopter. He builds and sells tricopters,T Copters,etc. His video’s give some good advise. Good luck with your Tricopter.